|
I am a graduate student at University of Pennsylvania specializing in Robotics. I completed my undergraduation from Nirma University, India where I majored in Mechanical Engineering. My research interest lies within the areas of robot navigation, simultaneous localization and mapping (SLAM), computer vision and machine learning. Previously,I was a research associate at Robert Bosch Center,Indian Institute of Science working on the problem of SLAM in dynamic environments. I also had the privilege to work at Robotics Research Center, IIIT-H with Professor Madhav Krishna on Autonomous Navigation. Feel free to check out my Resume and drop me an e-mail if you want to chat with me! |

|
|
|
|
Prashant Kumar*, Sabyasachi Sahoo*, Vanshil Shah, Vineetha Kondmeedi,Abhinav Jain, Akshaj Verma, Chiranjib Bhattacharyya, Vinay Viswanathan Proceedings of the AAAI Conference on Artificial Intelligence, 2021 Project page / Pre-print / Results Video / Code / Poster Reconstructing dynamic LiDAR scans to static for improved SLAM performance |

|
Unni Krishnan R Nair*, Anish Gupta*, D. A. Sasi Kiran, Ajay Shrihari, Vanshil Shah, K. Madhava Krishna Proceedings of European Control Conference, 2021 Project page Collision avoidance framework accounting uncertaininty of agent states without explicit model |
|
|
|
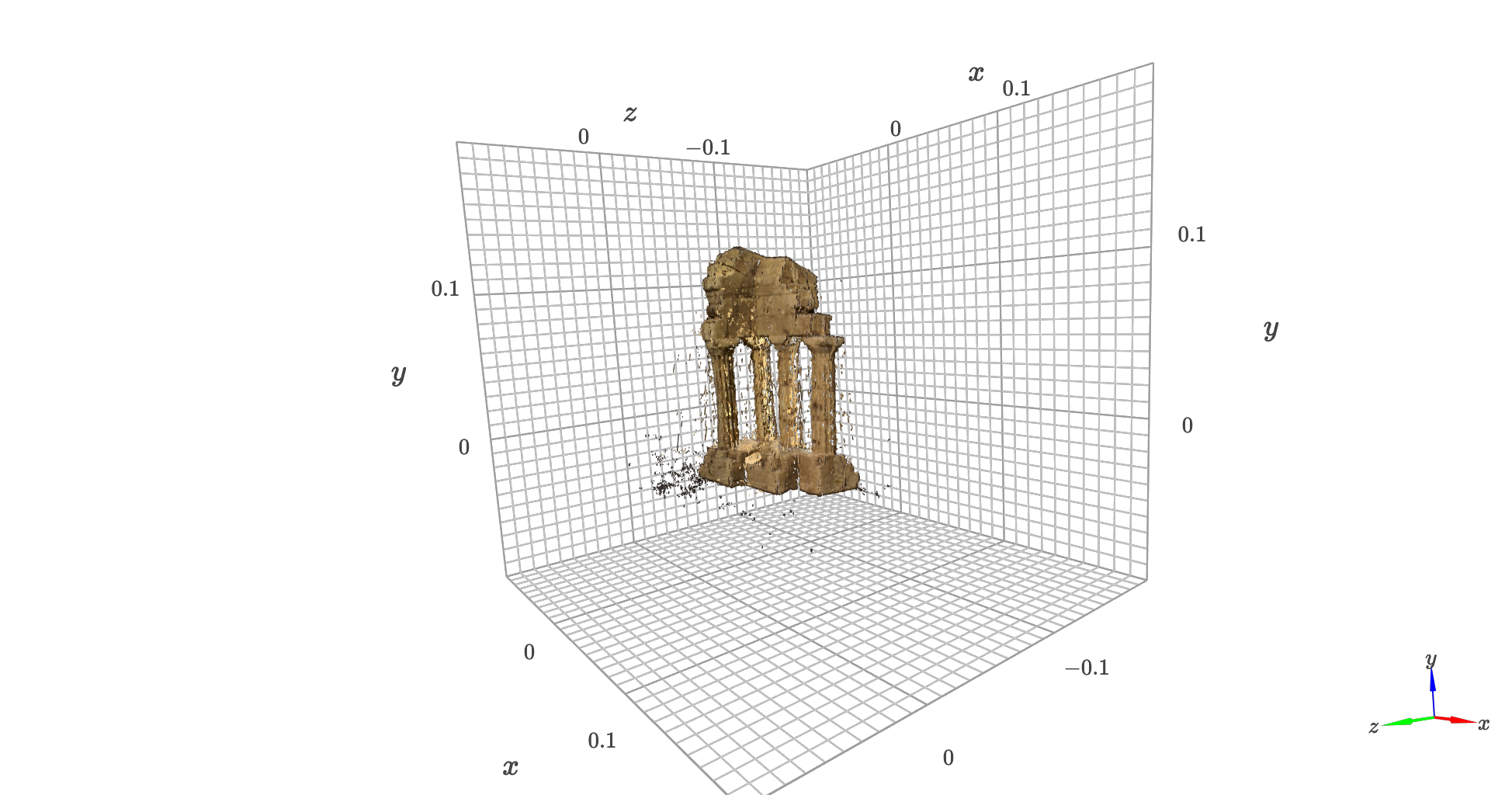
Perception Intern, Ford Motors (Autonomous vechicles Lab), Summer 2022 Slides / Report / Created a neural radiance field based model for augmenting datasets for downstream CV tasks |
|
Research Associate, IISc Video / Competition details Worked on enabling drone autonomy in smoke occluded environments for MBZIRC 2020 |
|
Summer Intern, Center for Artificial Intelligence and Robotics, 2019 Deployed navigation stack on tracked robots used by Defence forces |


|
Summer Intern, Atharva Robotics, 2018 Video Pan and tilt module for uniform spraying of water disinfectants |
|
|
|
A complete library for Franka Panda arm was developed for manipulation |
|
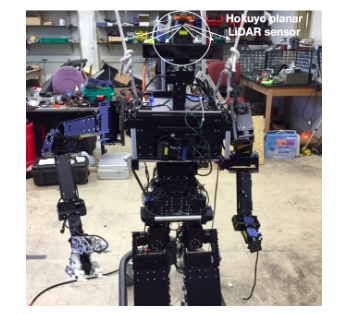
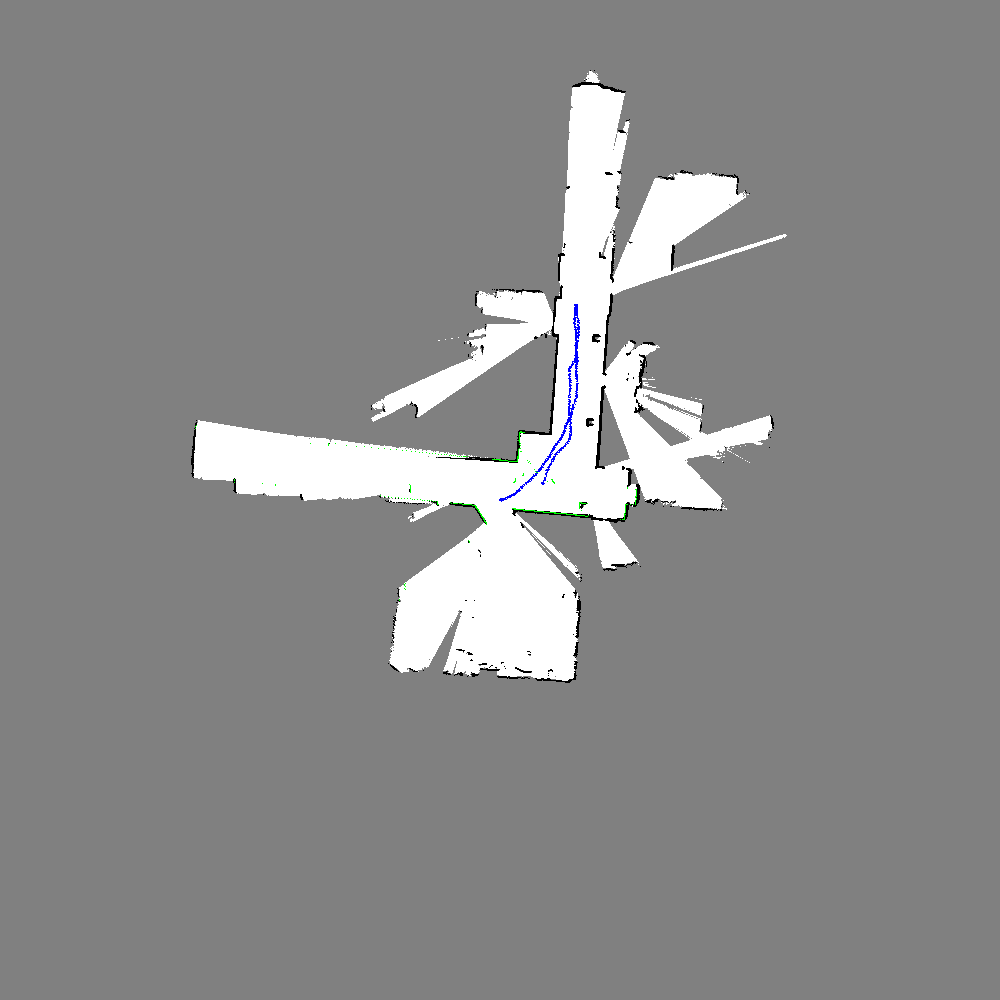
Implementation of Particle filter based SLAM algorithm for THOR humanoid robot |
|
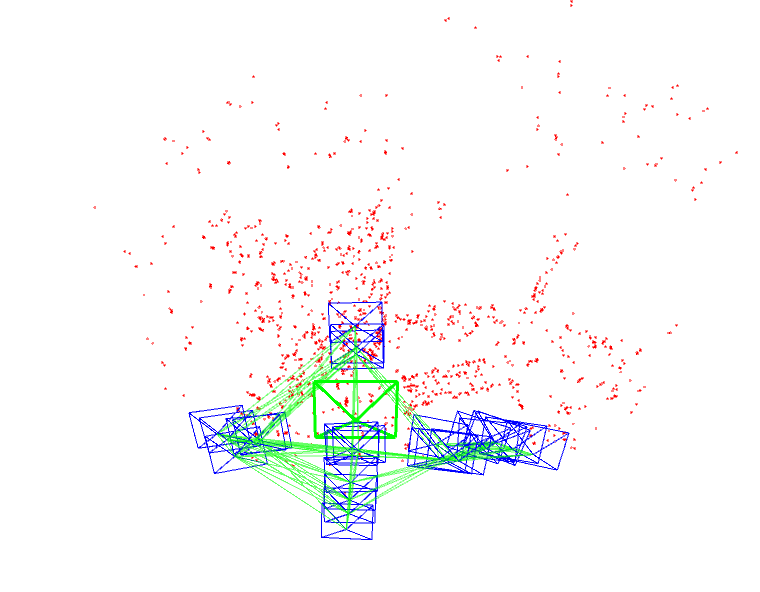
Implementation of stereo reconstruction and multi view stereo (plane sweep) algorithm from scratch |
|
RC Snake Robot with serpentine gait controller |
|
Website adapted from Jon Barron . |