|
I am a Deep Learning Algorithm Engineer at NVIDIA, where I build and ship production inference microservices for large language models and vision-language models. I hold an M.S.E. in Robotics from the University of Pennsylvania and a B.E. in Mechanical Engineering from Nirma University, India. My interests lie in large language models, deep learning, and high-performance inference — spanning custom backend optimizations in vLLM and TensorRT-LLM and end-to-end serving pipelines. Previously, I worked on 3D reconstruction and computer vision at Quidient, autonomous vehicle perception at Ford, and SLAM research at the Indian Institute of Science. Feel free to check out my Resume and drop me an e-mail if you want to chat with me! |

|
|
|
|
|
Deep Learning Algorithm Engineer, NVIDIA, Feb 2024 - Present NVIDIA API catalog / NIM for LLMs / NIM for VLMs Shipped 10+ production inference microservices for large language and vision-language models to enterprise customers, implementing custom backend changes in vLLM and TensorRT-LLM. |
|
|
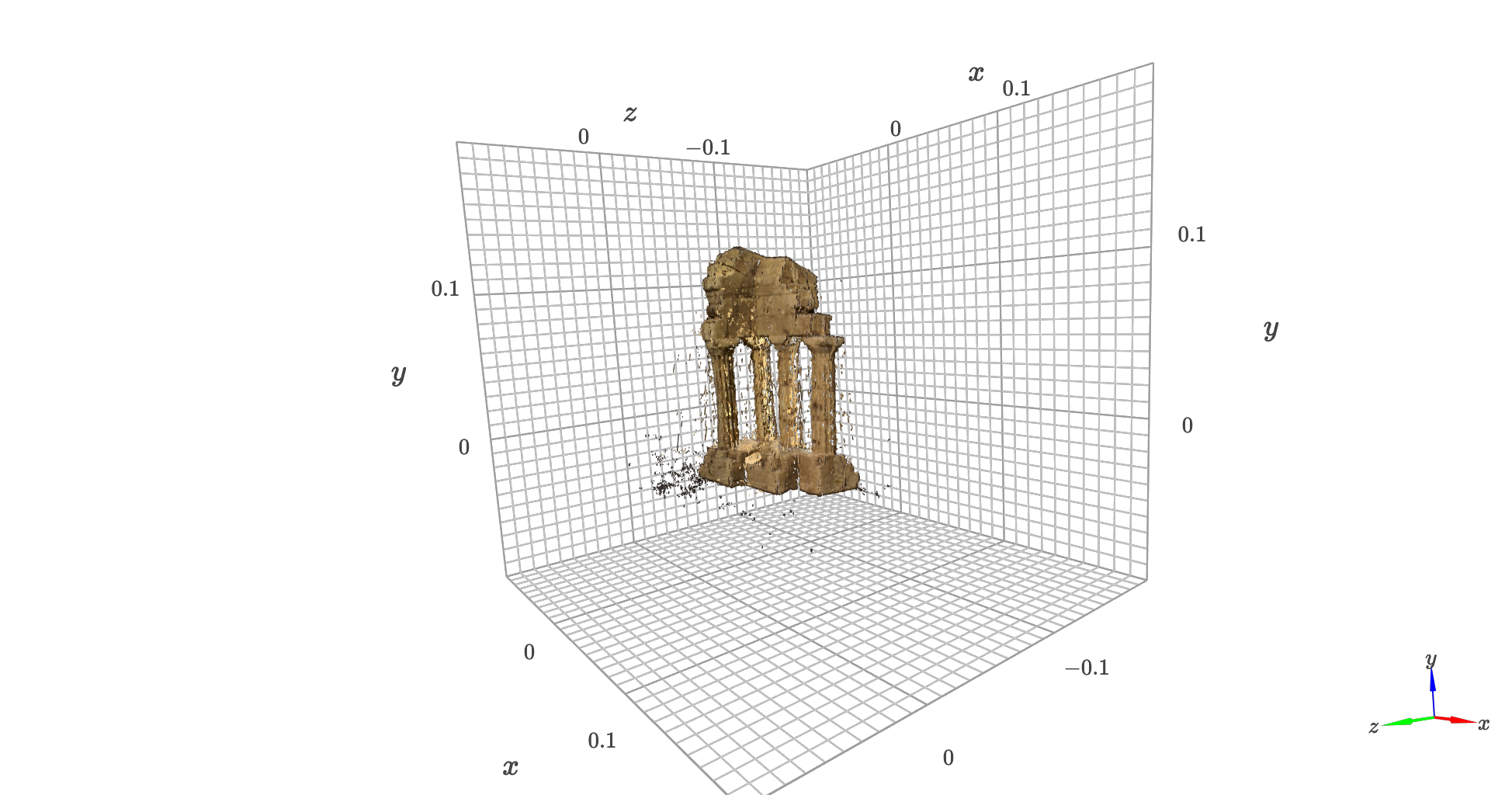
Computer Vision Engineer, Quidient, July 2023 - Jan 2024 Quidient Reality® Developed core Generalized Scene Reconstruction (GSR) algorithms for Quidient Reality®, producing relightable, millimeter-accurate 5D models from smartphone video. Built CUDA-enabled light physics module achieving 6x speedup in reconstruction. |
|
|
|
Perception Intern, Ford Motors (Autonomous Vehicles Lab), Summer 2022 Slides / Report Created a neural radiance field based model for augmenting datasets for downstream CV tasks |
|
Summer Intern, Center for Artificial Intelligence and Robotics, 2019 Deployed navigation stack on tracked robots used by Defence forces |
|
|
|
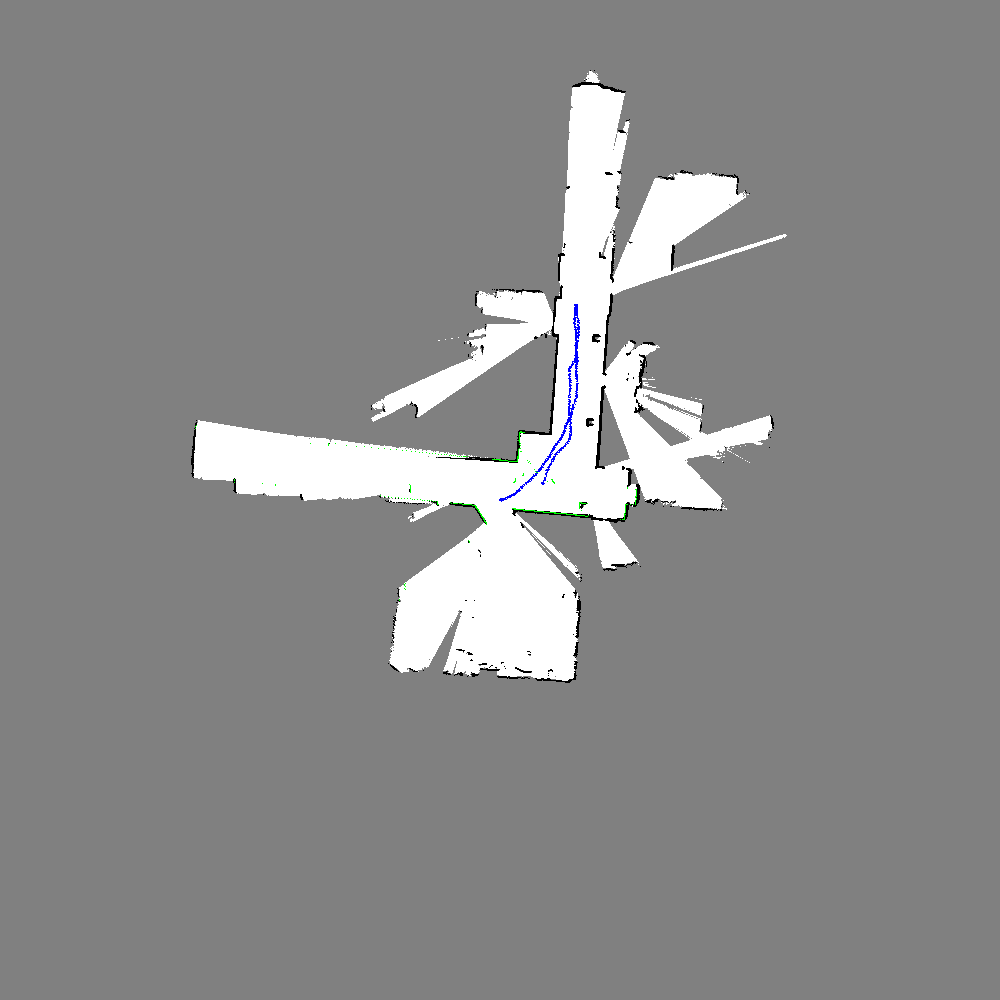
Prashant Kumar*, Sabyasachi Sahoo*, Vanshil Shah, Vineetha Kondmeedi, Abhinav Jain, Akshaj Verma, Chiranjib Bhattacharyya, Vinay Viswanathan Proceedings of the AAAI Conference on Artificial Intelligence, 2021 Project page / Pre-print / Results Video / Code / Poster Reconstructing dynamic LiDAR scans to static for improved SLAM performance |

|
Unni Krishnan R Nair*, Anish Gupta*, D. A. Sasi Kiran, Ajay Shrihari, Vanshil Shah, K. Madhava Krishna Proceedings of European Control Conference, 2021 Project page Collision avoidance framework accounting uncertainty of agent states without explicit model |
|
Research Associate, IISc Video / Competition details Worked on enabling drone autonomy in smoke occluded environments for MBZIRC 2020 |
|
|
|
A complete library for Franka Panda arm was developed for manipulation |
|
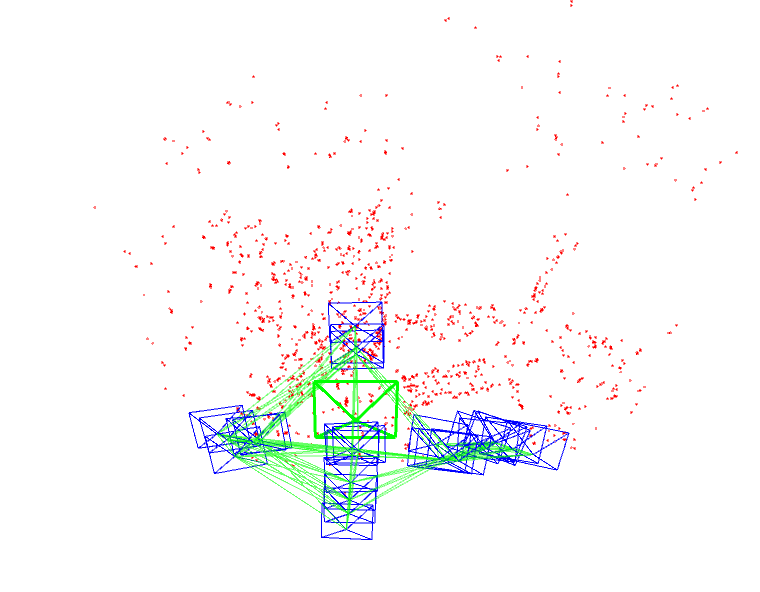
Implementation of Particle filter based SLAM algorithm for THOR humanoid robot |
|
Implementation of stereo reconstruction and multi view stereo (plane sweep) algorithm from scratch |
|
RC Snake Robot with serpentine gait controller |
|
Website adapted from Jon Barron . |